2.5 首次试玩
2.5.1 首次试玩步骤
按照2.3组装好小车,将开关拨到开启端。
若五分钟后发现蜂鸣器未响,网卡蓝色灯未亮,有可能是没有给jetbotmini烧录镜像,请将Jetbotmini配套资料 ->出厂镜像 内的镜像,烧录到内存卡中,烧录方法参考【3.2.1烧录镜像至MicroSD】。
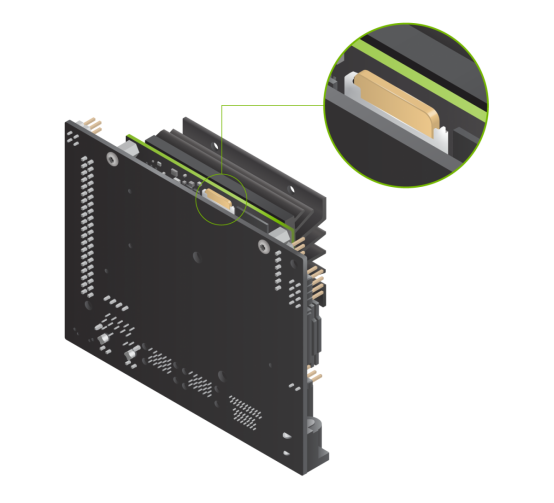
烧录好镜像后将sd卡插到jetsonnano主板背后的卡槽如下图,再上电。
- 开机以后会听到蜂鸣器鸣笛三声,状态指示灯闪烁,绿色可控灯长亮,3.3V指示灯长亮。
- 记录OLED显示的IP地址。
- jetbotmini出厂镜像默认开启热点模式,需要快速试玩的用户,可以用手机连接热点名称:jetbot-mini 密码:12345678 。
2.5.2 手机APP遥控
1. 下载与连接

Android/IOS手机用户扫描封面二维码下载遥控软件。IOS也可以在苹果应用商城搜索并下载【MakerControl】。
2. 开始连接使用:
机器人启动后听到三声鸣笛,状态指示灯闪烁,绿色可控灯长亮,3.3V指示灯长亮后稍等一段时间即可打开手机APP,选择【FPV遥控】进入【功能选择界面】,点击有上角WIFI图标进入配置界面,填写OLED显示的IP地址,配置完成点击连接,如果连接成功则会自动跳转功能选择界面。
(注:端口号port和端口号video默认为6000,6001,一般情况下请勿修改)

APP功能界面

遥控:

3. 注意事项、常见问题和解决方案:
① 开启Jetbotmini后初次进入带有相机实时画面的功能界面时,会初始化相机并启动相机驱动,在等待一小会儿时间后才会有图像显示,在此之前图像显示框显示为白色无图像状态为正常现象。
② 此时可以使用手机app控制,将app中连接的地址改为当前oled显示的ip地址,连接之后返回主控制界面。注意!!等到摄像头画面出来以后再进行遥控,否则会打断摄像头的初始化!导致摄像头无画面显示!!
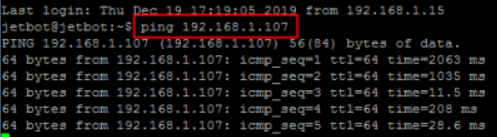
③ 如果手机app始终连接不上,一直没有跳转到主控制界面。那么需要关掉手机中的APP进程,在jetson nano终端ping一下手机的ip地址,ping通以后再重新进行连接。

④ 按下拍照按键会把照片保存至手机相册,具体保存目录在:手机存储目录/Pictures/YahboomAlbum ,首次使用请确认获取存储权限。
⑤ 如果APP遥控向前无法直走,可以修改/home/jetson/yahboom-jetbotmini/config.txt文件中的左右轮转速进行校准,速度范围0-255,数值越大速度越快,默认速度255。
⑥ 开发的时候需要连接有网络的路由器,可以手动连接WiFi:
- 有屏幕:
通过HDMI线连接到显示器,机器人上电,接上鼠标键盘,在屏幕右上角选择自己要连接的WIFI,连接完成后,可以在oled显示屏看到当前的网段信息。
- 无屏幕:
使用无头模式,用一根可以传输数据的MicroUSB线,一端连接Jetson nano主板,一端连接电脑,通- 过putty或者xshell远程登录jetbotmini,在终端通过指令连接WiFi。
无头模式登录ip:192.168.55.1 jetbotmini账户:jetson 密码:yahboom
例如WiFi名为:wifi_name WiFi密码是:12345678
那么可以使用指令: sudo nmcli dev wifi connect wifi_name password 12345678 连接WiFi
也可以使用VNC远程桌面手动连接WiFi,以上方法具体操作可参考3.3节(首次试玩可以不用配置静态地址)。
⑦ 注意,更换网络之后如需APP连接,需要重启jetbotmini或者重启大程序:
sudo systemctl stop jetbotmini_statssudo systemctl start jetbotmini_start
2.5.3 手柄遥控
关于手柄遥控的控制驱动请参考 6.2章节手柄的使用 或 9.3章节ROS机器人手柄遥控 使用。
使用有线手柄,可以选择jupyterlab或ROS驱动程序,运行后可以直接控制,以jupyterlab程序控制为例,控制方式如下图。

在使用无线手柄时,我们可以和手机APP结合,实现FPV遥控,以ROS程序控制为例,控制方式如下图。

效果如下图。
